
Nachdem melmacc nun eine zufriedenstellende Grundfunktionalität aufwies, wurde es an der Zeit für neue Ideen. Eine der Aufgaben, die uns in der händischen Ausführung am meisten störte, war das Hineinstecken eines Strohhalms in den fertigen Drink. Also musste dafür eine automatisierte Lösung gefunden werden.
Recht bald entstand die Idee, einen Roboterarm zu konstruieren, der den Strohhalm nicht nur ins Glas stecken, sondern den Cocktail dabei auch gleich umrühren konnte. Um dem allgemeinen Erscheinungsbild von melmacc zu entsprechen und aus persönlichem Interesse entschieden wir uns gegen eine fertige Lösung und für eine komplette Eigenkonstruktion des Arms.
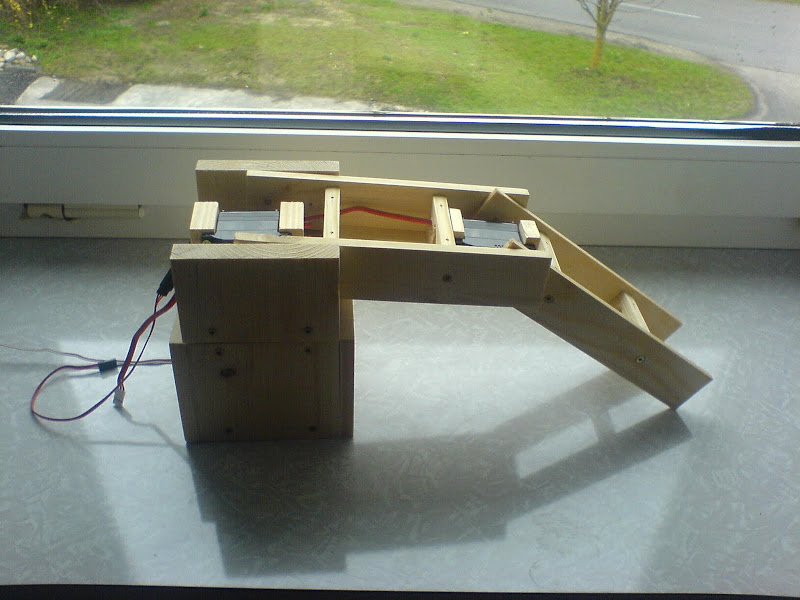


Nach mehreren Monaten des Bauens und der Programmierung der zugehörigen Software war es dann Zeit für den ersten Test:
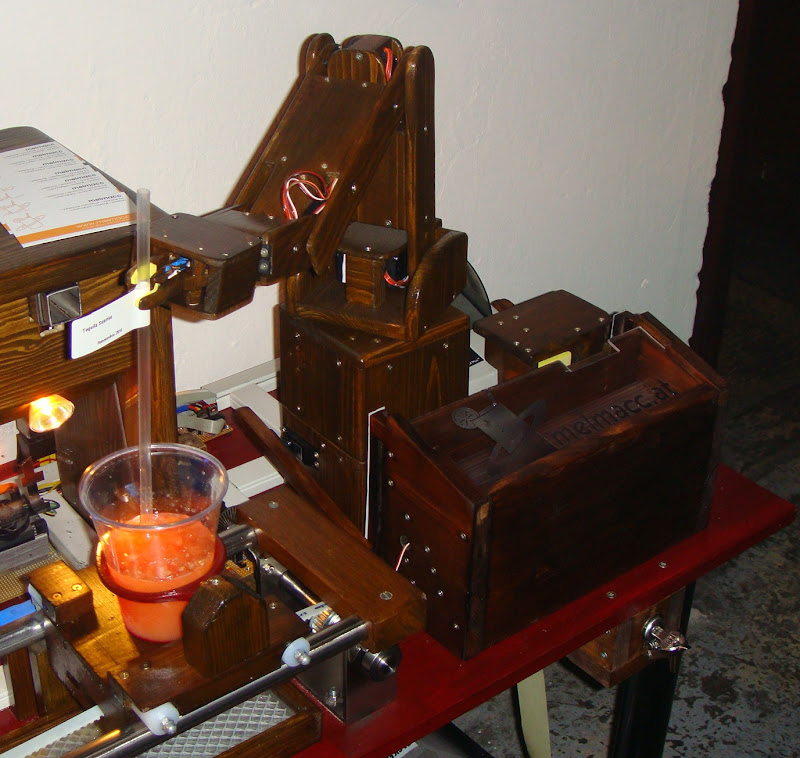
Zufrieden mit unseren Bemühungen konnte der Roboterarm nun fertig gebeizt und lackiert und schließlich in den Rest von melmacc integriert werden:
Hallo
Vor ca. 2 Jahren habe ich schon eimal so etwas gesehen, und wollte es auch etwa in dem Stil bauen. Momentan bin ich noch am verschiedene Möglichkeiten auszudenken, wie ich es am einfachsten umsetzen kann.
Nun würde es mich interessieren wie ihr den Schlitten auf den beiden Stangen betreiben und abgefragt habt.
Was ich auch noch nicht entschieden habe habe, wie und wo ich das ganz programmiere. Könnt ihr mir irgendwas kostengünstiges und einfaches empfehlen. Da ich kein C# programmieren kann denke ich, dass es mit einem arduino oder einer kleine SPS gehen sollte.
Freundliche Grüße
Simon Walder
Hallo,
bei unserem Cocktailroboter wird der Wagen durch einen Zahnriemen gezogen, der mit unserem Motor verbunden ist. Die Positionierung erfolgt zum einen durch einen Inkrementalgeber am Motor, der die Geschwindigkeit und zurückgelegte Distanz misst. Zum anderen verwenden wir ein selbst entwickeltes Positionierungssystem auf Magnetbasis um sicherzustellen ob sich der Wagen auch wirklich vor der gewünschten Zutat befindet.
Zur Steuerung bieten sich vor allem Microcontroller, wie der Arduino, ganz gut an. Hier gibt es eine riesige Auswahl, und auch entsprechende Hilfestellungen zur Programmierung (meist in C) im Internet. Wenn der Cocktailroboter viele Aufgaben gleichzeitig zu erfüllen hat (wie beispielsweise bei uns die Steuerung des Arms für die Strohhalme), stößt man mit kleinen Controllern aber relativ schnell an die Grenzen. In derartigen Fällen können dann die Prozessorpins und/oder die Anzahl der Hardwaretimer nicht mehr ausreichend sein, und die Programme werden oftmals komplex und unübersichtlich.
Wir hoffen dass wir hiermit deine Fragen klären konnten, und wünschen dir viel Spaß und Erfolg beim Umsetzen deines Projekts.
Schöne Grüße,
das melmacc-Team